Привід
Серед приводів найбільш поширені пневматичні варіанти, де управління механізмом здійснюється поршнем, що переміщуються всередині циліндра повітрям.

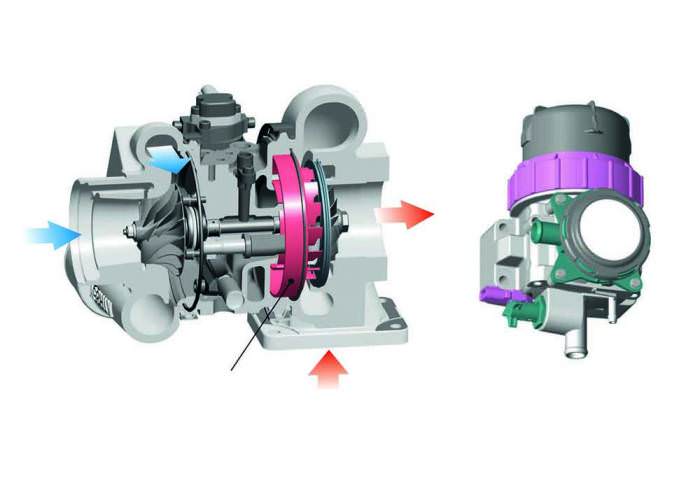
Положення лопатей регулюється мембранним приводом, пов’язаних штоком з лопатевим кільцем управління, тому горловина може постійно змінюватися. Актуатор призводить шток в залежності від рівня вакууму, протидіючи пружині. Модуляція вакууму контролює електричний клапан, що подає лінійний струм в залежності від параметрів вакууму. Вакуум може створюватися вакуумним насосом підсилювача гальм. Струм подається від акумулятора і модулює ЕБУ.
Основний недолік таких приводів обумовлений складно передбачуваним станом газу після стиснення, особливо при нагріванні. Тому більш досконалими є гідравлічні і електричні приводи.
Гідравлічні приводи функціонують за тим же принципом, що і пневматичні, але замість повітря в циліндрі використовується рідина, яка може бути представлена моторним маслом. До того ж вона не стискається, внаслідок чого така система забезпечує кращий контроль.
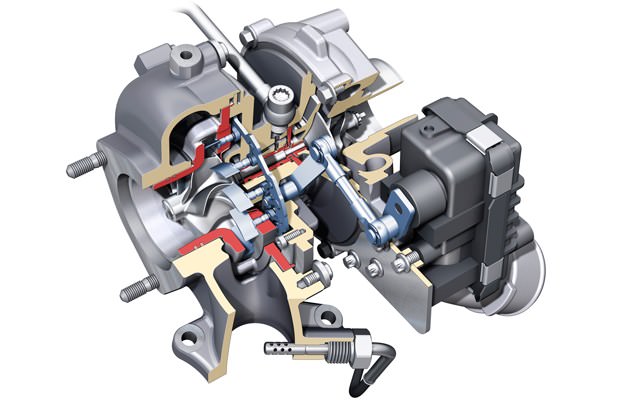
Для переміщення кільця електромагнітний клапан використовує тиск масла і сигнал ЕБУ. Гідравлічний поршень переміщує зубчасто-рейковий механізм, що обертає зубчасту шестерню, внаслідок чого лопаті шарнірно з’єднуються. Для передачі положення лопаті БУД по кулачку її приводу переміщається аналоговий датчик положення. При малому тиску масла лопаті відкриті і закриваються з його зростанням.
Електричний привід є найбільш точним, так як напруга може забезпечити дуже тонкий контроль. Однак він вимагає додаткового охолодження, що забезпечують трубками з охолоджуючою рідиною (у пневматичних і гідравлічних варіантах для видалення тепла використовується рідина).
Для приводу пристрою зміни геометрії служить селекторний механізм.
У деяких моделях турбін використовується обертовий електричний привід з прямим кроковим двигуном. В даному випадку положення лопатей регулюється електронним клапаном зворотного зв’язку через механізм рейкової передачі. Для зворотного зв’язку з БУД служить прикріплений до шестірні кулачок з магниторезистивным датчиком.
При необхідності повороту лопаток ЕБУ забезпечує подачу струму в певному діапазоні для переходу їх у задане положення, після чого, отримавши сигнал від датчика, знеструмлює клапан зворотного зв’язку.